Cùng với sự phát triển của vật liệu từ chế tạo nam châm vĩnh cửu (NCVC) và công nghệ điều khiển, với những ưu điểm của động cơ đồng bộ nam châm vĩnh cửu (PMSM) như: tỷ số mô-men xoắn/quán tính cao, mật độ công suất cao, hiệu suất cao, đáng tin cậy và dễ bảo trì, được sử dụng rộng rãi trong máy CNC công cụ, robot công nghiệp,… Vì vậy, việc thiết lập mô hình mô phỏng động cơ PMSM, hệ thống điều khiển của động cơ PMSM có ý nghĩa rất lớn trong việc kiểm chứng nhiều thuật toán điều khiển và tối ưu hóa toàn bộ hệ thống điều khiển.
Trong nội dung bài báo, nhóm tác giả dựa trên việc phân tích mô hình toán học của động cơ PMSM, sử dụng tư duy mô đun, với khả năng mô phỏng linh hoạt của Matlab/Simulink, các thuật toán điều khiển dòng trễ xây dựng mô hình mô phỏng hệ thống điều khiển PMSM. Thông qua việc mô phỏng một động cơ cụ thể, nhóm tác giả phân tích nhiều dạng sóng mô phỏng ở các điều kiện làm việc khác nhau. Từ kết quả của mô hình đánh giá tính đúng đắn với lý thuyết điều khiển động cơ PMSM đã biết từ đó xây dựng các bài toán phức tạp hơn.
Mô hình toán học động cơ đồng bộ nam châm vĩnh cửu
Khi phân tích và mô phỏng động cơ PMSM, chúng ta cần đưa ra một số giả thiết để mô hình hoá lý tưởng động cơ:
- Bão hoà của lõi thép trong động cơ không đáng kể;
- Bỏ qua tổn hao dòng điện xoáy phu cô hoặc tổn thất phụ trong lõi thép.
- Các thông số của động cơ PMSM không đổi trong quá trình nghiên cứu;
- Động cơ có dây quấn ba pha đối xứng.
Bộ điều khiển Relay cho động cơ PMSM
Công nghệ điều khiển véc tơ dựa trên nguyên lý dòng điện phần ứng động cơ và dòng điện kích từ làm việc vuông góc với nhau, giữa chúng không có sự ràng buộc nên có thể được điều khiển độc lập, dựa trên lý thuyết biến đổi hệ tọa độ, điều khiển biên độ và hướng của dòng điện stato động cơ trong hệ trục toạ độ đồng bộ dq thông qua việc giải các thành phần ngang trục và dọc trục giúp giải quyết bài toán động cơ xoay chiều (AC) tương tự như bài toán động cơ một chiều (DC). Điều khiển véc tơ có ý nghĩa nghiên cứu rất lớn đối với điều khiển động cơ, đưa công nghệ điều khiển động cơ bước sang một kỷ nguyên phát triển mới. Các nhà nghiên cứu đã đưa điều khiển vectơ vào động cơ PMSM ba pha, nhận thấy rằng do động cơ đồng bộ không có hiện tượng trượt nên việc thực hiện điều khiển vectơ của PMSM ba pha sẽ thuận tiện hơn. Đối với công nghệ điều khiển véc tơ PMSM ba pha thường bao gồm ba phần chính: vòng điều khiển tốc độ, vòng điều khiển dòng điện và thuật toán điều khiển động cơ PMSM. Trong đó, chức năng của vòng điều khiển tốc độ là điều khiển tốc độ của động cơ sao cho nó có thể vừa điều chỉnh tốc độ vừa ổn định tốc độ; còn chức năng của vòng điều khiển dòng điện là tăng tốc quá trình điều chỉnh động của hệ thống sao cho dòng điện stato của động cơ có thể xấp xỉ tốt hơn vectơ dòng điện đã đặt trước. Đối với hệ thống điều khiển được cấp nguồn bằng bộ biến tần nguồn điện áp, việc điều khiển vòng dòng điện có thể được chia đơn giản thành điều khiển dòng điện trong hệ tọa độ tĩnh và điều khiển dòng điện trong hệ tọa độ quay đồng bộ. Hiện nay, các bộ điều khiển Relay và điều khiển dòng điện PI sử dụng phổ biến trong các bộ điều khiển dòng điện động cơ PMSM. Nhóm tác giả sẽ giới thiệu ngắn gọn nguyên lý làm việc cơ bản cùng phương pháp mô hình hóa mô phỏng điều khiển Relay cho động cơ PMSM.
Trong các hệ điều khiển nghịch lưu nguồn điện áp, điều khiển relay hay còn gọi là điều khiển dòng điện trễ cung cấp một phương pháp điều khiển đầu ra dòng điện nhất thời. Ý tưởng cơ bản là so sánh tín hiệu dòng điện tham chiếu với tín hiệu dòng điện đầu ra thực tế được phát hiện của bộ nghịch lưu. Nếu giá trị dòng điện thực tế lớn hơn giá trị đã cho thì trạng thái chuyển mạch của bộ nghịch lưu sẽ được thay đổi để giảm nó và ngược lại. Bằng cách này, dòng điện thực tế thay đổi theo hình răng cưa xung quanh dạng sóng dòng điện nhất định và độ lệch được giới hạn trong một phạm vi nhất định. Vì vậy, hệ thống nghịch lưu sử dụng điều khiển dòng điện trễ (relay) bao gồm một vòng điều khiển tốc độ và một vòng kín dòng điện sử dụng điều khiển relay sẽ tăng tốc độ điều chỉnh động triệt tiêu nhiễu loạn nội vòng, và phương pháp điều khiển dòng điện này rất đơn giản, không phụ thuộc vào thông số động cơ và có độ bền tốt.
Nhược điểm của bộ điều khiển Relay là: tần số chuyển mạch của biến tần thay đổi theo các điều kiện hoạt động khác nhau của động cơ, phạm vi thay đổi rất lớn, hoạt động không đều, dạng sóng dòng điện đầu ra có xung lớn và những thay đổi này sẽ gây ra nhiễu. Mặc dù những thiếu sót trên có thể được khắc phục bằng cách đưa ra liên kết khóa tần số hoặc chuyển sang phương pháp triển khai kỹ thuật số loại chuyển mạch đồng bộ, nhưng việc triển khai tương đối phức tạp. Trên thực tế, do sự kết nối giữa ba pha, giá trị gợn sóng của dòng điện có thể đạt gấp đôi kích thước của vòng trễ.
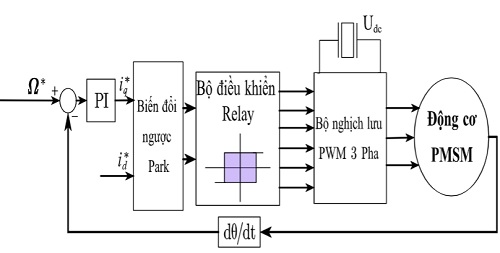
Sơ đồ khối điều khiển Relay của động cơ PMSM 3 pha
Nội dung nghiên cứu đã trình bày mô hình toán học của động cơ PMSM trên hệ trục toạ độ dq, đưa ra phương pháp và thiết kế điều khiển Relay. Từ đó đưa ra mô hình mô phỏng hệ thống điều khiển động cơ PMSM với bộ điều khiển Relay. Từ các kết quả mô phỏng với đánh giá có thể thấy bộ điều khiển Relay được thiết kế có hiệu quả tốt có khả năng chống nhiễu và đáp ứng cho một hệ điều khiển động cơ PMSM thực tế.
Ứng dụng của bộ điều khiển Relay cho hệ thống điều khiển động cơ PMSM giúp nâng cao chất lượng điều khiển của hệ thống. Tuy nhiên, loại bộ điều chỉnh này có một số nhược điểm trong đó có thể thấy được dao động của mô men điện từ khi ổn định cũng như khi khởi động và đảo chiều lớn, đây là do ảnh hưởng một phần của sóng hài trong hệ thống. Nhóm tác giả tiếp tục nghiên cứu sâu hơn nhằm cải thiện đặc tính tốt hơn, hạn chế được sóng hài trong hệ thống. |